





負重助行機械人面世
負重行走是軍事活動、應急救援、日常生活中的常見活動,高強度負重行走不僅會導致人體代謝急劇上升、作業效率下降,還易引發肌肉骨骼損傷等健康風險。
現有以外骨骼為主的穿戴式機械人,其助力方向與人體行進方向夾角大、助力效率低。與背包負重的方式相比,人體新陳代謝率僅能降低約百分之十。中國南方科技大學機械與能源工程系的研究團隊日前提出了穿戴式半人馬負重助行機械人。該機械人通過獨特的軟化彈性耦合機構與人機協同控制策略,兼具高負載能力與高運動靈活性,實現了助力與平衡的動態解耦。該機械人可使人體行走代謝成本降低高達百分之卅五,為負重助行提供了全新的高效解決方案。
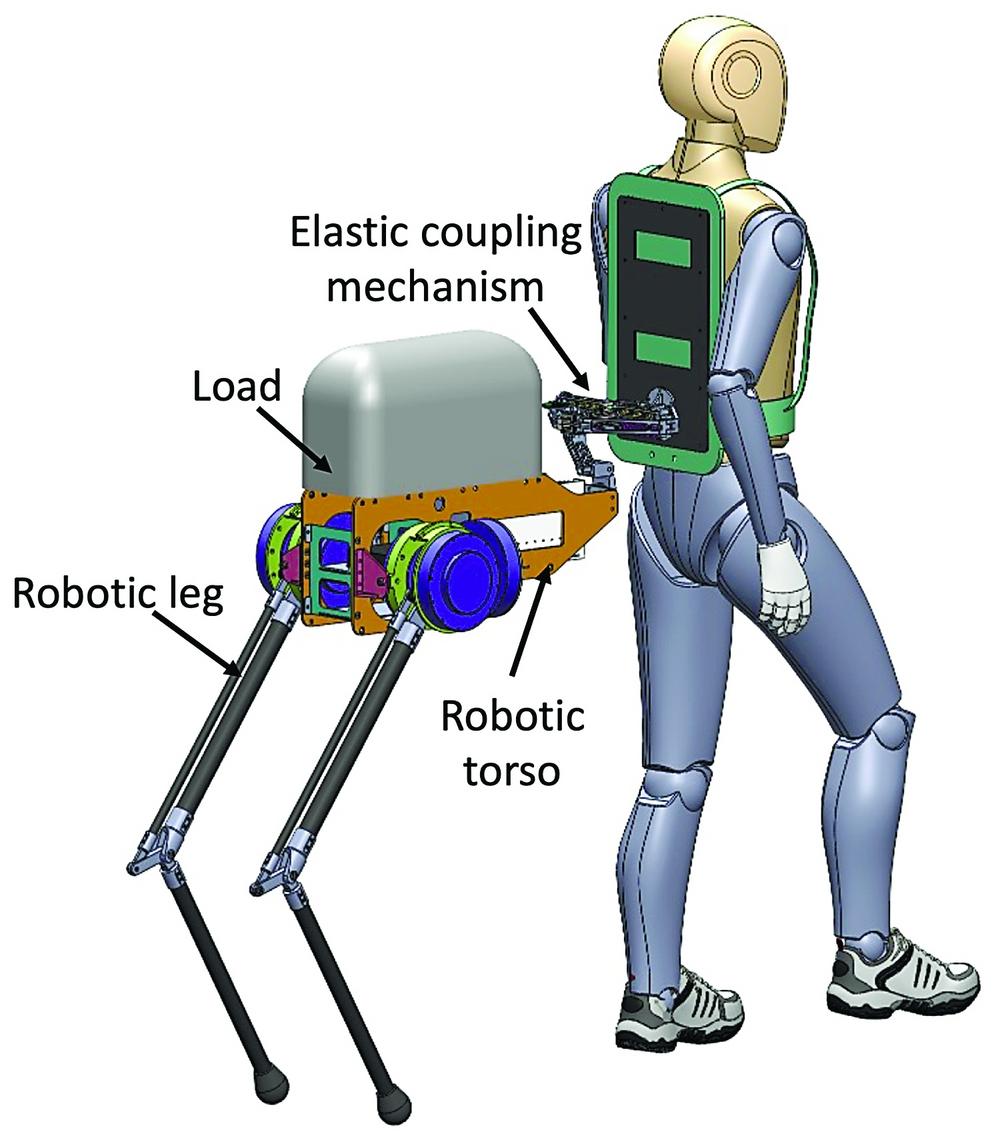
研究團隊提出了一種全新的人機協作模式:機械人不與人腿剛性並聯,而是作為獨立的肢體,借助穿戴式彈性耦合介面與人背部連接。此構型構建了“人類智能領航加機械人力量負重”的人機混合四足系統,既保留了人類在複雜環境下的導航決策能力,又發揮了機械人分擔重量並高效提供行進方向推力的作用。
此外,研究人員還設計了基於菱形連杆與拮抗彈簧的“軟化彈性耦合機構”,可實現在作用力小時剛度大、回應快,在作用力大時剛度小、緩衝強,使機械人能夠像獨立個體一樣穩定控制,同時通過介面精準輸出助力。結合所提出的“行走與交互協同控制框架”,半人馬機械人能夠即時感知人體運動意圖,在無需人工指令的情況下實現高精度全向跟隨運動,並在維持自身平衡的同時,向人體提供穩定的水平行進推力。
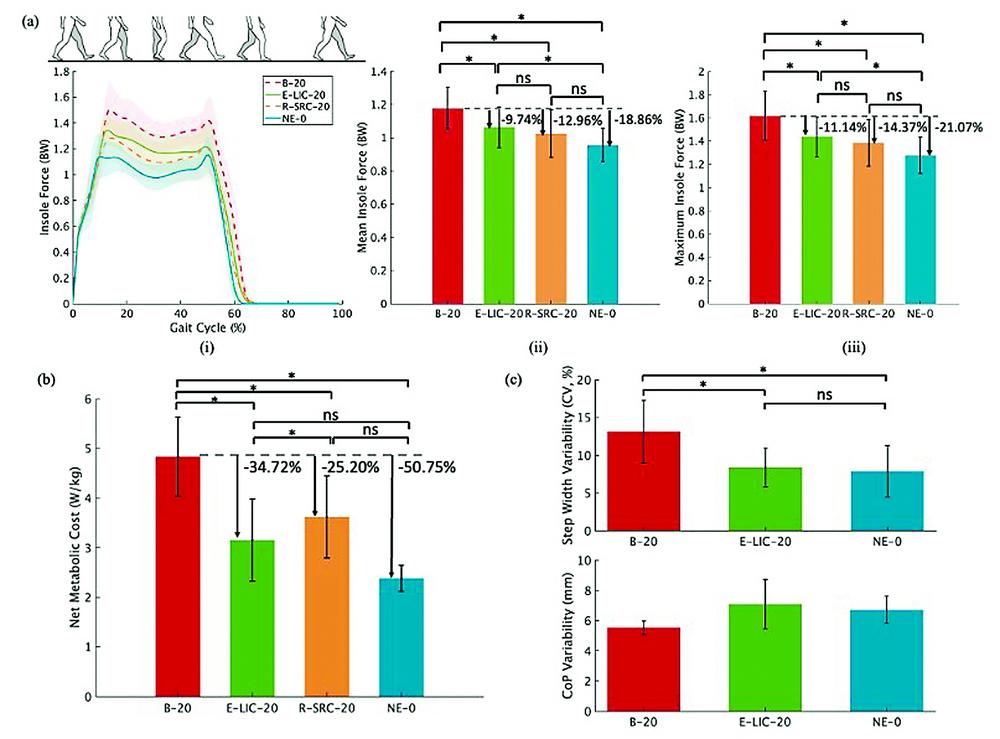
從現場的實驗視頻可見,機械人展現了卓越的靈活性與良好的地形適應能力,不僅能在一米狹窄空間內連續完成“8”字繞樁,還能利用視覺感知自主規劃策略,順暢通過台階、斜坡及戶外複雜路面。研究人員指出,在負重效能方面,相較於背負二十千克重物的情況,穿戴半人馬機械人並具有水平助力條件下,人體淨代謝成本顯著降低了百分之卅五,足底壓力減少了百分之五十二。此外,受試者穿戴該機械人後,步寬變異性顯著降低,其穩定性指標與零負載空載行走無顯著差異,這表明,半人馬人機四足構型能有效緩解負重力對人體帶來的行走擾動,並顯著提升負重行走的側向穩定性。
研究人員指出,未來,該機械人有望在應急救援與物資轉運、野外巡檢與勘探、複雜地形後勤保障等方面進行應用。該機械人將人類在非結構化環境中的適應性與決策優勢,與腿足機械人在承載與地面交互方面的能力有機結合,為面向挑戰環境的負重行走輔助提供了全新思路。
小 米
