



華研仿生撲翼機械人
中國研究團隊早前發佈消息稱,該團隊的研究人員設計並研製了“小隼二點○”仿生撲翼機械人,首次實現姿態可控的仿鳥起飛運動,完美復刻鳥類起飛狀態。
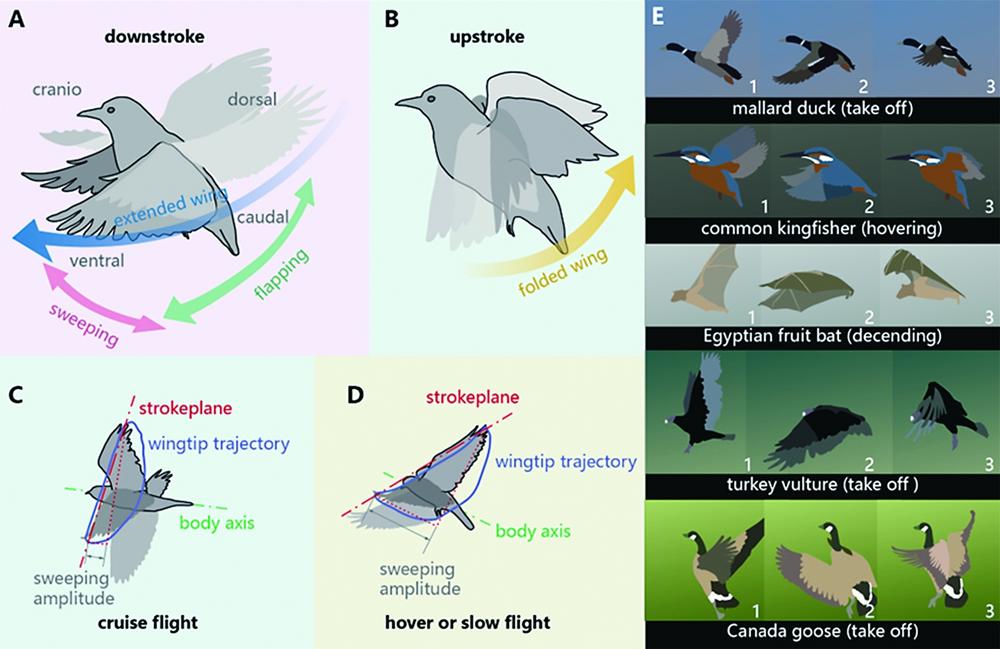
研究人員分析認為,鳥類與蝙蝠等飛行脊椎動物普遍採用一種特殊的撲翼動作來實現低速飛行。它們的翅膀通過向腹側和前側揮舞的下撲過程以及幾乎不產生氣動力的收折上撲過程來實現這種撲翼動作模式。當飛行脊椎動物從起飛、降落或准懸停的低速飛行狀態向巡航平飛的高速飛行狀態轉變時,翅膀的掃掠運動幅度逐漸減小,翼尖運動軌跡的向後傾斜程度也隨之減小,這使得轉換過程中飛行脊椎動物的撲動模式是連續變化的。研究團隊把低速飛行狀態下包含了翅膀撲動運動、掃掠運動、折疊運動的這種撲動模式定義為FSF撲動模式,這種翅膀撲動模式在仿生撲翼機械人領域鮮少被探討和應用。
對此,研究團隊設計並研製了“小隼二點○”的仿生撲翼機械人,其通過全新的可重構撲動機構能夠完美實現掃掠幅度與折疊幅度可調的FSF撲動模式,從而首次實現姿態可控的仿鳥起飛運動。“小隼二點○”的FSF撲動模式基於圓錐搖臂機構,能夠將撲動翼的撲動、掃掠、折疊運動耦合,從而維持相同撲動周期下各自由度不同的撲動相位;通過耦合精細設計的結構柔性扭轉變形和展向彎曲變形,進而首次實現了對鳥類“撲動——扭轉——掃掠——展縮——彎折”五種複合運動的完美復刻;並能通過兩種解耦機構實現在運行過程中對掃掠幅度和折疊幅度的重構調節,更準確地模擬了飛行脊椎動物低速飛行時的撲翼運動學過程。
在多次實驗中,團隊通過可以實現仿鳥複雜運動和氣動力、柔性變形同時可測的風洞實驗平台,進一步發現了撲動翼掃掠幅度對FSF撲動模式產生的升力及俯仰力矩的影響機理;通過高精度計算流體力學模擬手段揭示了FSF撲動模式的氣動特性與前緣渦強度及壓力中心的前後位置變化強耦合的空氣動力學機理;通過動力學模擬研究了基於掃掠幅度調節的俯仰控制策略對起飛階段俯仰姿態控制效果,並最終通過實機飛行測試驗證了“小隼二點○”的仿鳥自主起飛能力與姿態控制能力。研究人員指出,這項成果不僅能為鳥類飛行機理的研究帶來新的視角與方法,並推動仿生程度更高、飛行更廣的仿生撲翼機械人研究的發展。
美 子
