


大小機械臂助航天員“一臂之力”
據央視新聞客戶端消息:神舟十五號乘組首次出艙活動中,指令長費俊龍搭乘大小機械臂組合臂在艙段間進行轉移,完成出艙任務。
在這次出艙任務中,我們還將看到大小機械臂的級聯。不過與上次有所不同,這一次機械臂移動距離將更長。
大範圍轉移航天員
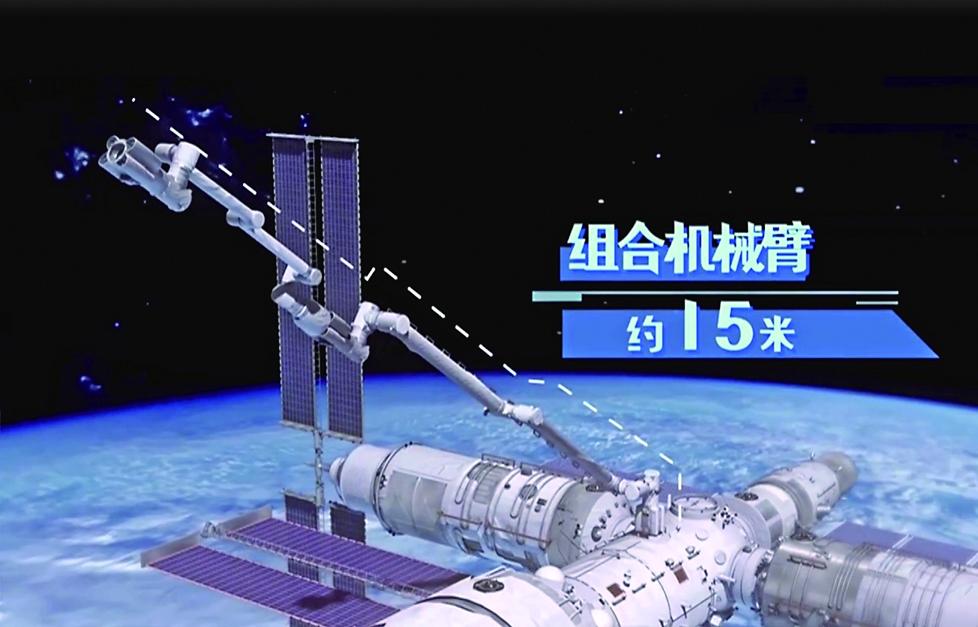
大機械臂是指空間站核心艙機械臂,長度可達十點二米,小機械臂指的是問天實驗艙機械臂,長度有五米。小機械臂位置精度高,大機械臂工作範圍大,兩者結合就可以讓艙外航天員獲得最佳工作狀態。
航天科技集團五院空間站機械臂主管設計師于月平表示,在本次出艙任務中,大小臂級聯協同以組合臂的形式支持航天員的艙外作業任務。其中大臂主要是負責將航天員在各個作業點間進行大範圍轉移,到達作業點之後小臂進行精細運動,運送航天員到達期望的位置和姿態。此外組合臂還具有應急返回功能,就是一旦危險出現的時候,可以快速將航天員送回。
中國空間站“T”字基本構型組裝完成後,艙外機械臂移動空間變小,在移動過程中需要躲避太陽翼帆板、艙外載荷等精密儀器設備,一旦出現碰撞不僅會損壞空間站,也會危及機械臂上航天員的生命安全。
于月平稱,因為涉及艙一和艙二之間的一個大範圍轉移,過程當中可能接觸的東西就會比較多,考慮避障的時候就比較複雜。整個運動過程和艙體以及太陽翼之間的安全距離問題,我們之前在地面上已經規劃好了。在仿真軟件中來看,為了航天員的安全,我們要做到的不僅是避障,是要盡可能離它遠。其次就是需要優化路徑,因為移動太長時間的話影響工作效率。
執行艙外檢查維護
除了承載航天員出艙,大小機械臂還將在未來獨自在艙外執行艙外狀態檢查、艙外貨物轉移及安裝、艙外維護維修、載荷照料等任務,協助空間站穩定運行。
神舟十五號乘組圓滿完成首次出艙活動,這也是我國航天員在中國空間站進行的第八次出艙,對於航天員和艙外航天服來說也是一次新的考驗和挑戰。為了保證此次出艙活動的順利開展,中國航天員中心艙外服團隊在任務前,同航天員一起對空間站內三套艙外航天服進行了細緻的狀態檢查。
艙外航天服狀態好
目前,在中國空間站裡一共有三套艙外航天服,均為“飛天”第二代航天服,採用輪換使用的方式支持航天員開展出艙活動。通過調節可以適應不同身高和體重的人體參數。這次任務中,航天員費俊龍、張陸分別穿着紅色A和藍色B艙外航天服。
中國航天員中心艙外服信息管理與電源分系統主管設計師李鵬偉表示,航天員重點要調節艙外服的上下肢的尺寸,要根據他們個人的身高進行一個重點的調節,保證艙外服跟他們個人的一個很好的適配性。我們此次出艙活動選擇了艙外服A以及艙外服B,從前期使用情況來看,艙外服B的使用次數是最多的,我們就通過對艙外服B的一個多次的使用,最大利用它的壽命指標。
為保證航天員出艙安全,任務中,地面支持人員要對艙外航天服工作狀態進行實時監測。
李鵬偉表示,我們所有艙外航天服工作狀態都是良好的,按總體的策劃來講,是要把艙外服B先達到一個使用壽命,來累積它的一個使用次數以及使用壽命的這麼一個情況,為後期我們產品的一個研製積累數據。因為前期航天員也在軌進行了多次的出艙活動,然後針對前期出艙活動中遇到的一些操作不方便不靈活的問題,我們也進行了改進。前期遇到的一些問題應該基本上都得到了解決。
