


我空間站機械臂成功轉位飛船
據新華社、香港中通社報道:中國載人航天工程辦公室發佈消息稱,北京時間六日六時五十九分,經過約四十七分鐘的跨系統密切協同,空間站機械臂轉位貨運飛船試驗取得圓滿成功,這是中國首次利用空間站機械臂操作大型在軌飛行器進行轉位試驗。
本報綜合報道
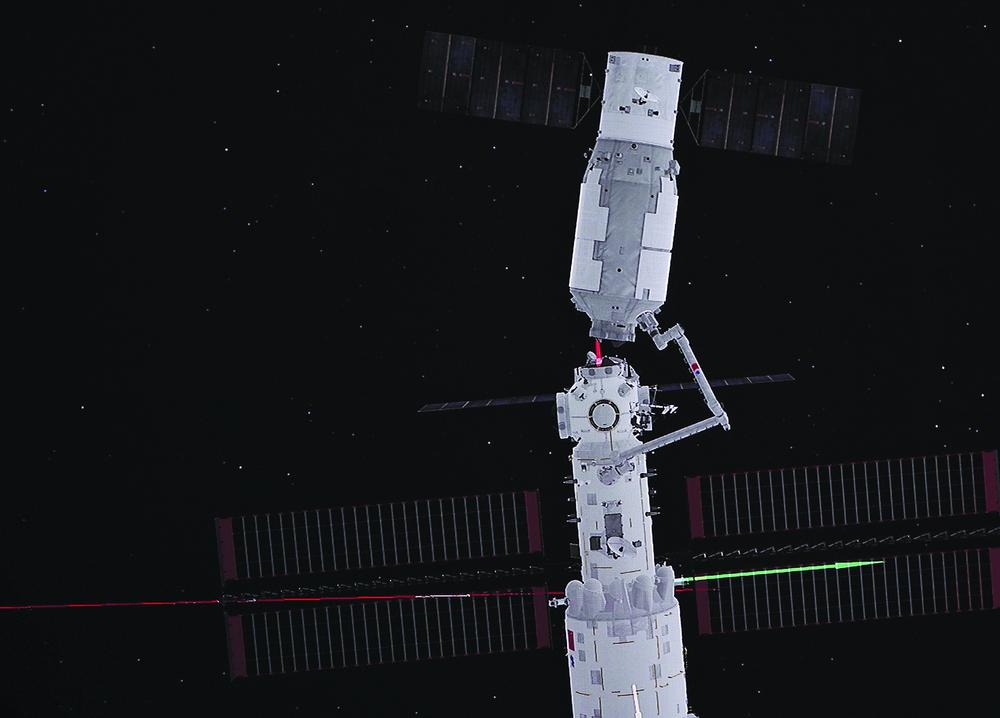
六日凌晨,機械臂成功捕獲天舟二號貨運飛船。六時十二分轉位試驗開始,天舟二號貨運飛船與天和核心艙解鎖分離後,在機械臂拖動下以核心艙節點艙球心為圓心進行平面轉位;其後,反向操作,直至貨運飛船與核心艙重新對接並完成鎖緊。
組裝空間站作準備
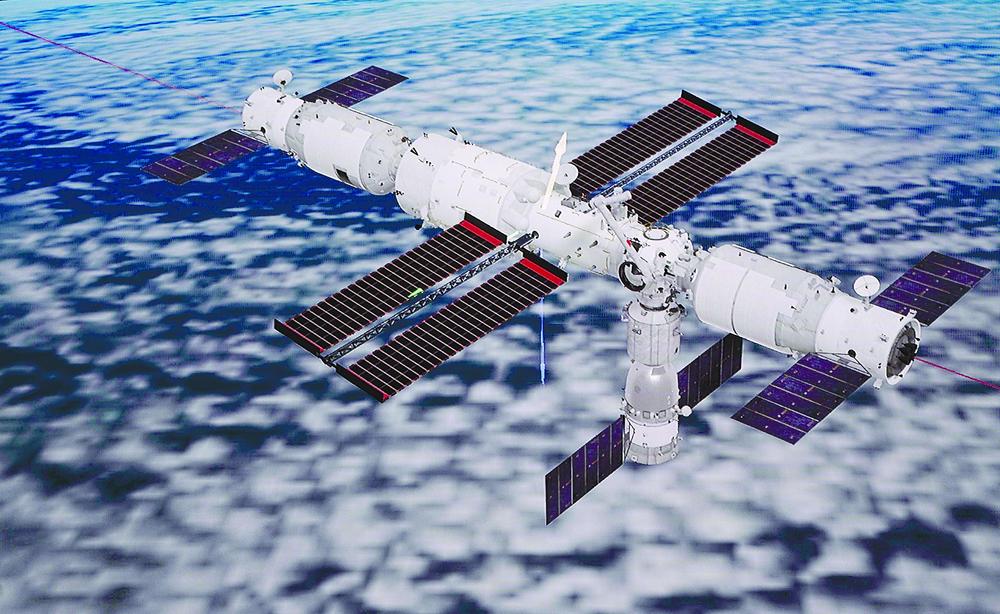
北京航天飛行控制中心貨運飛船任務總師鄒雪梅向媒體表示,此次任務執行得非常順利。“空間站後續要做組裝,實驗艙艙一和艙二上去對接的時候,它會首先對接在前向對接口,最終組裝完成。大家都知道它是個T字形,艙一和艙二要轉到側向的對接口去,這個動作就要靠轉位來完成,就為了組裝建造和作準備而轉一個方向。”
據了解,這台機械臂由航天科技集團五院研製,是目前同類航天產品中複雜度最高、規模最大、控制精度最高的空間智能機械系統。機械臂長度十點二米,最多可承載廿五噸的重量,可以輔助移動實驗艙,也可以輔助航天員出艙活動。
對於此次任務的難點,中國載人航天工程副總設計師劉晉表示:“它的難度主要是機械臂在空間操作一個大型的裝置,對於這個路徑的規劃以及穩定性的控制開展了充分的驗證,這是後邊空間站建造過程中必不可少的技術。雖然經過了多次的仿真和地面試驗,由於跟空間微重力條件下有很大的區別,所以要對這些結果在空間進行實際的驗證。”
驗證技術積累經驗
此次試驗,初步檢驗了利用機械臂操作空間站艙段轉位的可行性和有效性,驗證了空間站艙段轉位技術和機械臂大負載操控技術,為後續空間站在軌組裝建造積累經驗。
