


我空間站機械臂首托航天員
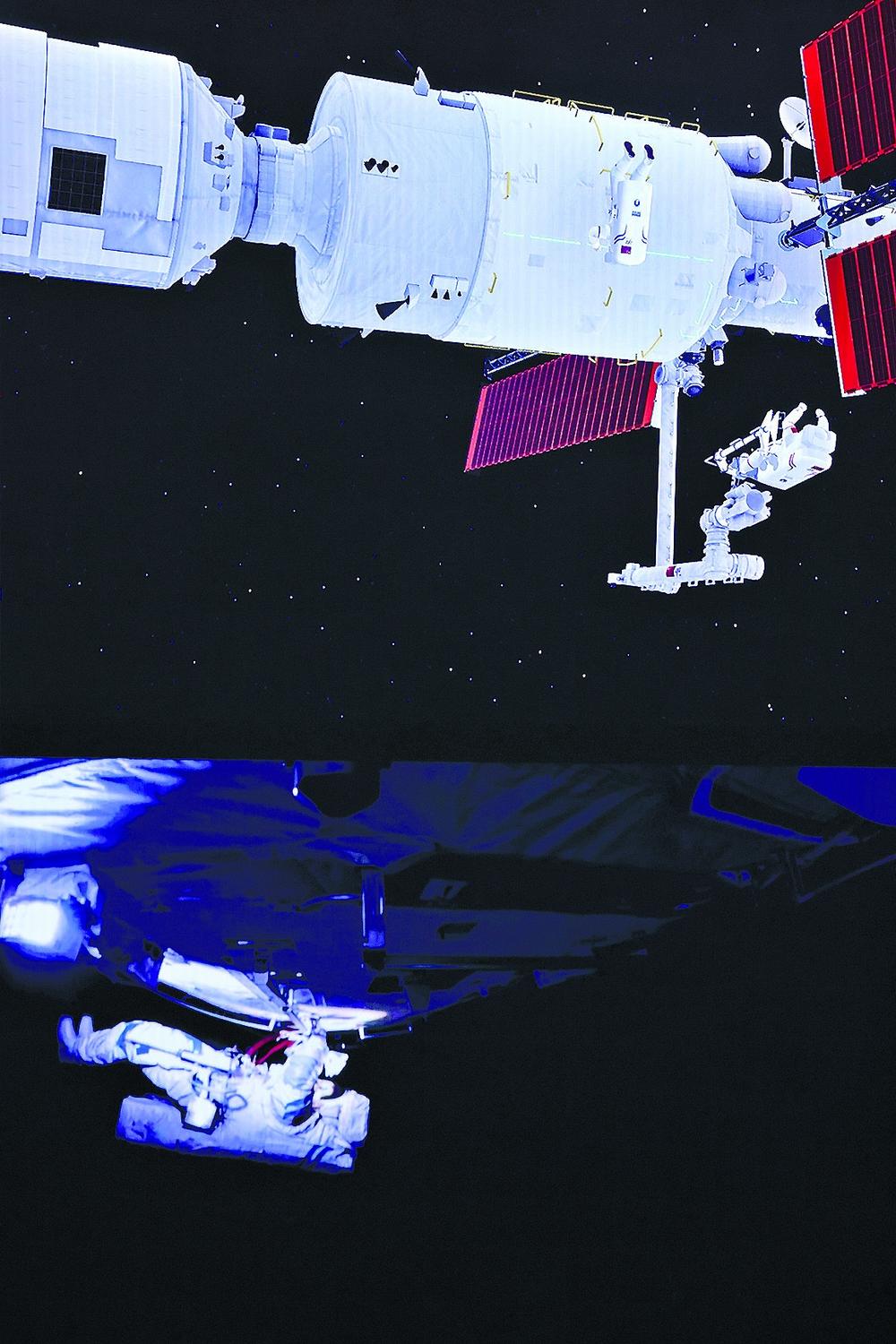
【中新社北京四日電】中國航天員劉伯明、湯洪波今天順利出艙,空間站核心艙機械臂首次托舉航天員劉伯明到指定位置圓滿完成出艙操作,抬升天和核心艙艙外全景相機的位置,並驗證了機械臂的大範圍轉移能力。
空間站機械臂是中國航天事業發展的新領域之一,中國成為世界上第三個掌握大型空間機械臂核心技術並應用的國家。
核心部件國產化
空間站核心艙機械臂由中國航天科技集團五院抓總研製,是目前同類航天產品中複雜度最高、規模最大、控制精度最高的空間智能機械系統,主要承擔艙段轉位、航天員出艙活動、艙外貨物搬運、艙外狀態檢查、艙外大型設備維護等八大類在軌任務。核心艙機械臂展開長度為十點二米,最多能承載二十五噸的重量,是空間站任務中的“大力士”。
空間站機械臂是中國航天事業發展的新領域之一,中國成為世界上第三個掌握大型空間機械臂核心技術並應用的國家,全部核心部件實現國產化,並形成了多項國家空間機器人行業標準,引領空間智能裝備的中國製造之路。
七個關節可爬行
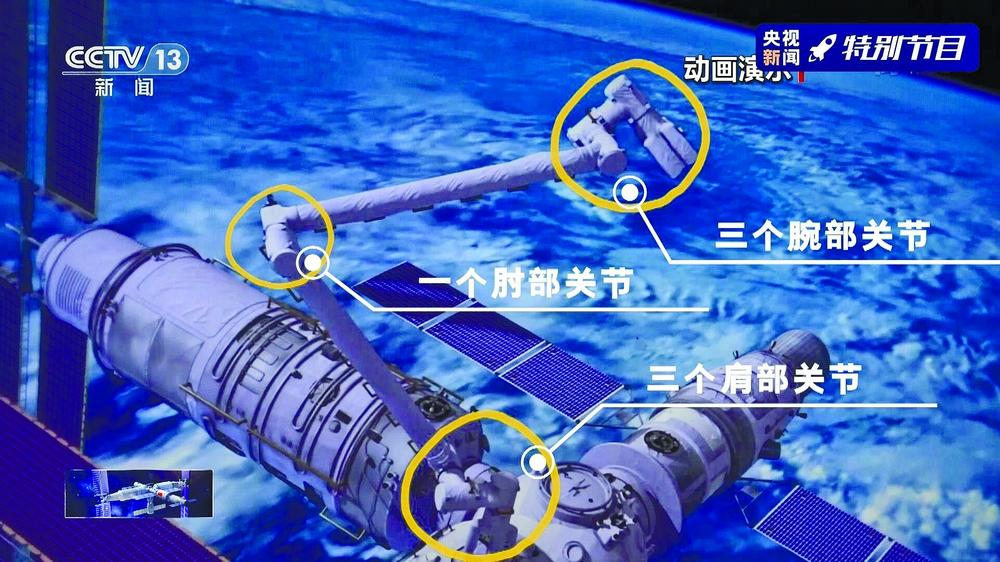
空間站核心艙機械臂是中國首個可長期在太空軌道運行的機械臂,其肩部設置了三個關節、肘部設置了一個關節、腕部設置了三個關節,一共七個關節,每個關節對應一個自由度,就如同人的手臂一般,具有七自由度的活動能力。
通過各個關節的旋轉,能夠實現自身前後左右任意角度與位置的抓取和操作,為航天員出艙順利開展出艙任務提供強有力的保證。
為擴大任務觸及範圍,空間站核心艙機械臂還具備“爬行”功能。由於核心艙機械臂採用了“肩三加肘一加腕三”的關節配置方案,肩部和腕部關節配置相同,意味着機械臂兩端活動功能是一樣的。
同時肩部與腕部各安裝了一個末端執行器,作為機器臂的觸手,末端執行器可以對接艙體表面安裝的目標適配器,機械臂通過末端執行器與目標適配器對接與分離,同時配合各關節的聯合運動,從而實現在艙體上的爬行轉移。
十套“控制大腦”
為實現整個機械臂的平穩運行和精確定位,空間站機械臂各處裝有“控制大腦”,包括一套機械臂中央控制器、七套關節控制器和兩套末端控制器。
其中,機械臂中央控制器是機械臂管理系統的控制和通信樞紐,負責接收地面飛控人員的各種指令,迅速制定動作方案,進而控制機械臂精準地完成各種動作。該控制器實際上是一台高性能、高可靠的宇航計算機,核心部分採用三模冗餘設計架構,三個模塊同時執行相同的操作,能夠有效識別故障風險,大幅提高可靠性。
關節控制器和末端控制器負責控制空間站核心艙機械臂七處關節、兩處末端執行機構,對各位置的信息交互起到連接和轉發的功能,對於機械臂關節和末端的靈活性和精準度起到至關重要的作用。
