




華機械人識走梅花樁
中國騰訊公司日前發佈消息稱, 該公司研發的四足機械人和自平衡輪式移動機械人取得突破性進展。
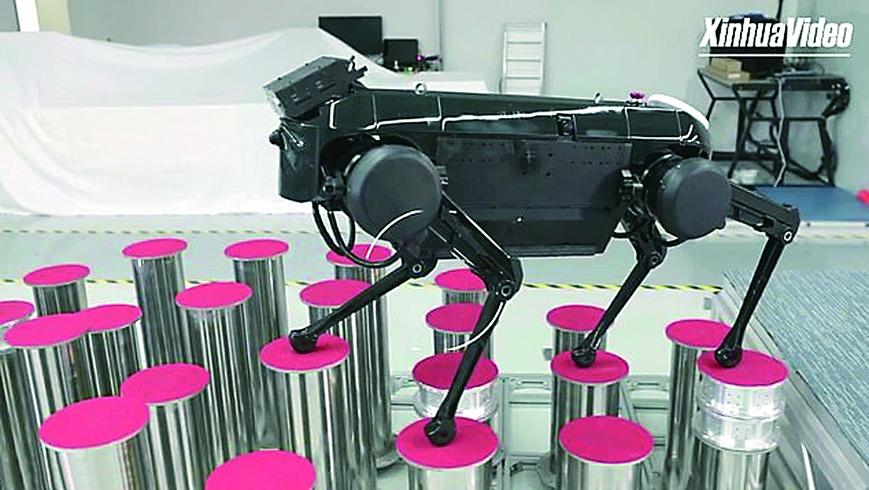
騰訊公司研發的四足機械人名為“賈莫卡”(Jamoca),是國內首個能完成走梅花樁複雜挑戰的機械人,而自平衡輪式移動機械人的相關研究成果還入選機械人行業的頂級成果。以上兩項技術均來自騰訊機械人X實驗室,屬於移動方向上的技術突破。
據研發人員介紹稱,“賈莫卡”機械人更常見的名字是“機械狗”,它重約七十公斤,長一米、寬○點五米、站高○點七五米,能走、能跑、能跳。值得注意的是,它能挑戰梅花樁複雜地形。梅花樁是中國功夫的重要訓練道具之一,習練梅花樁也是武俠小說中修煉輕功的基礎。
研發人員指出,研發團隊在外部提供的本體之上,基於自研機械人控制技術,為“賈莫卡”打造了一個能應對複雜環境的智能大腦。這個大腦讓“賈莫卡”能行走、小跑和跳躍,並賦予它自主定位和避障的能力。
據公開視頻顯示,“賈莫卡”機械人完成的挑戰由高六十厘米、呈二十度斜面角度的台階和鄰樁最大高度差十六厘米、間距不等的梅花樁兩部分組成。其中,考驗機械人移動能力的難點主要有兩方面,第一是理解梅花樁的排佈(包括位置和高度)、選擇最佳落腳點及路線並穩定精準地行走(落腳到梅花樁中心點)。
研發人員稱,“賈莫卡”機械人能成功完成以上操作,這正對應實驗室在移動技術方面研究的兩個核心技術模塊,分別是感知、運動規劃與控制,以及整機系統設計與搭建,實現系統性的集成融合。此外,從機械人挑戰結果看,研發團隊已達到極高的技術標準——誤差一厘米內的感知定位、根據環境進行的十毫秒級路線規劃、基於動力學的實時力矩控制、梅花樁中心點一厘米內的落腳誤差,以及全系統的高度協同。
研發人員指出,在精準環境感知方面,“賈莫卡”機械人創新性地實現魯棒的眼腳標定,並利用特定相機對周圍環境開展實時感知。同時,利用算法識別和提取出台階和梅花樁的表面區域範圍和中心點位置,將定位和識別的數據進行融合,從而重建出整個三維運動場景。
此外,與四足機械人一同取得突破還有一款自平衡輪式移動機械人,又稱為自平衡單車, 它在傳統輪式移動機械人的基礎上,增加動量輪及其電機驅動系統,使得機械人可以在靜止及行進狀態下均保持平衡不倒。
研究人員稱,自平衡輪式移動機械人的硬件平台完全自研,重約十五公斤,長一點一五米,高○點五二米,它的控制能力又可以細分為行進中的動態自平衡和停止行進時的靜態自平衡。行進中的動態自平衡是依靠前把轉動進而帶動車身的轉動實現,而停止行進時的靜態自平衡則採用動量輪力矩平衡技術,應用角動量守恆的原理實現自平衡控制。此外,機械人在不同的路面狀況下,例如遇到上下坡時,也都表現出較好的運動能力和平衡性能。甚至對於行駛路徑上存在特定約束的情況,比如沿着獨木橋行駛的場景,它也能應對。
多 姿
