


美“機械手”識操作電線
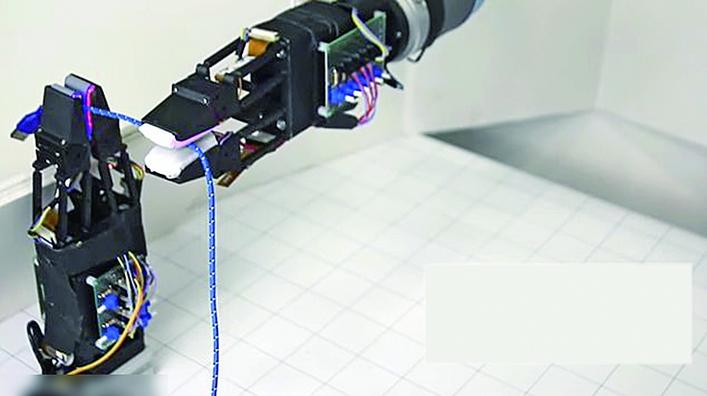
美國麻省理工學院日前對外展示了一對搭載高分辨率觸覺傳感器的“機械手”,它們能夠靈活操作電纜、電線等可變形物體,未來更可幫助主人疊衣服。值得注意的是,它可以使用一個自動鉗子來執行一些通常只有人類才能完成的任務,比如操作繩索和電纜。
在通常情況下,機械人操作電纜需要在有機械約束的條件下開展,即通過把繩子放置在桌上等方式,形成準靜態結構,降低電纜的自由度後,機械人再開展操作。研究團隊稱,這款新型“機械手”首次在沒有其他機械幫助的情況下實時操作電纜。對於機械人來說,實時操作諸如電纜、金屬絲之類的可變形柔性物體是困難的。因為這些柔性物體的形狀會隨著滑動而發生動態變化。而機械人的“手指”必須不斷感應並調整物體的位置和運動。
從研發人員演示新型“機械手”視頻操作中可見,這“機械手”輕輕夾住電線,再沿著電線一側滑動,全過程流暢順利。研發人員希望,隨著機械人及其軟件的複雜程度不斷提高,它將能夠完成更複雜的任務,比如打結、疊衣服,甚至給人縫線。
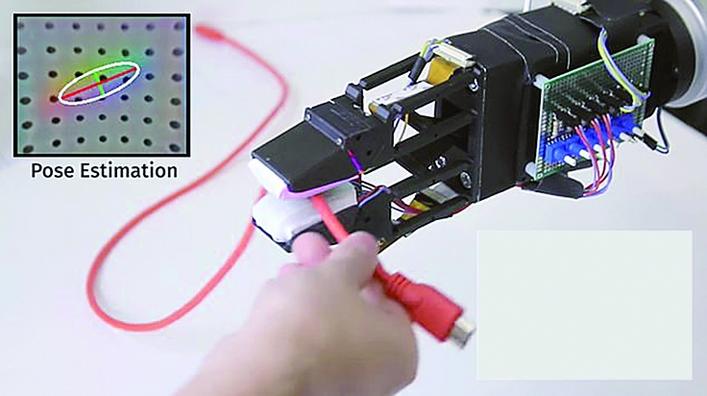
研發人員介紹稱,這款“機械手”在設計方面,主要由一對夾具狀的兩指抓爪和機械臂組成。兩隻具有力和位置控制功能的抓爪位置相對,並能夠迅速移動。這對抓爪被安裝在機械臂上,機械臂也能夠移動。實現“機械手”實時並操作電纜需要滿足多種條件。首先,需控制抓握力以實現電纜在抓爪中平穩滑動;其次,需要控制其“抓握姿勢”以防止電纜從抓爪的“指間”掉落。研究團隊通過觸覺傳感和控制器設計來解決上述問題。
外界對於這款“機械手”為何可以操作靈活?研發人員這樣解釋稱,結合了機械設計、觸覺傳感和控制器設計三個領域開發“機械手”。而最大亮點在於,其中每一個具體環節都不是特別複雜,但是它們結合在一起就能夠解決很多複雜問題。
在整個設計過程中,隱藏在“指尖”的觸覺傳感器如何有機融合機械設計、觸覺傳感和控制器設計這三個相對獨立的領域系統是最困難。
目前,這款“機械手”還沒有投入實際使用。研發團隊稱,如果有合適的機會,希望能夠和企業合作推廣它。“機械手”還有改進空間,例如“機械手”的尺寸還沒有達到理想狀態,未來計劃進一步縮小它的尺寸來執行更加靈活的任務。
美 子
